Multimedia Content

Visualization of car accidents in Chicago (USA)
Course: Interactive Data Visualization
January 19, 2024
Using data visualizations with Vega-Lite and Kepler, in this blog it is explored the frequency of car accidents across Chicago's boroughs and their primary causes between January 3, 2021, and May 5, 2021.
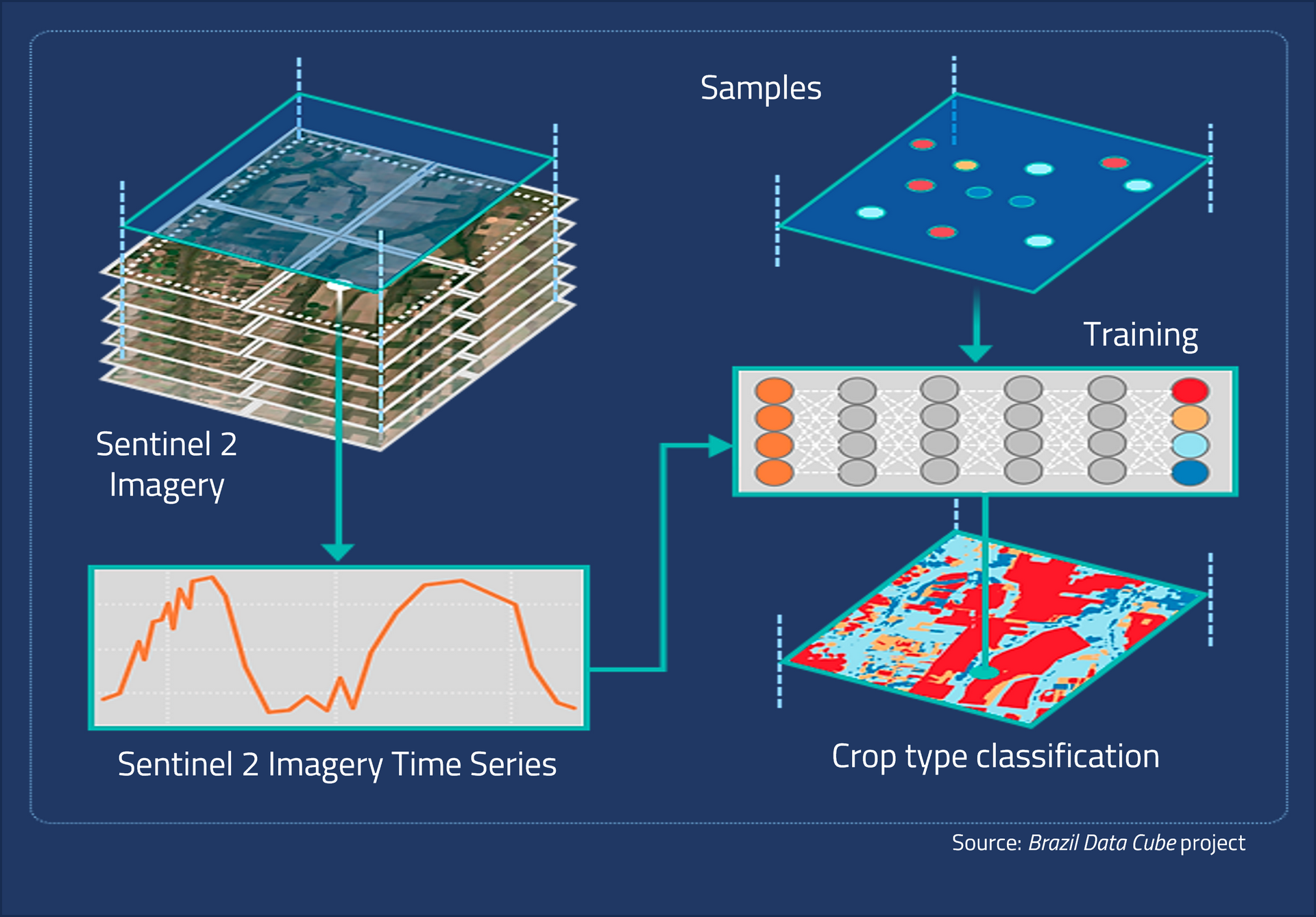
Deep Learning models for crop-type classification
Course: Deep Learning
January 5, 2024
The main idea of this notebook is to classify various crops by analyzing time series data collected from France via Sentinel 2 satellite imagery. Specifically, three approaches are studied and compared: MLP, LSTM and Self-Attention Transformer Network.
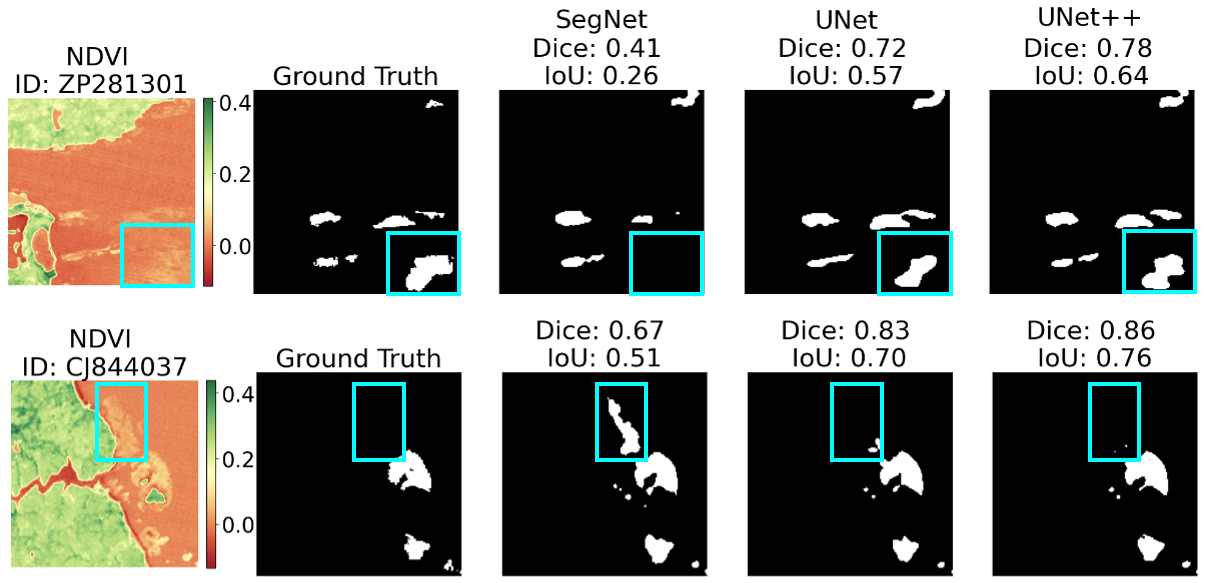
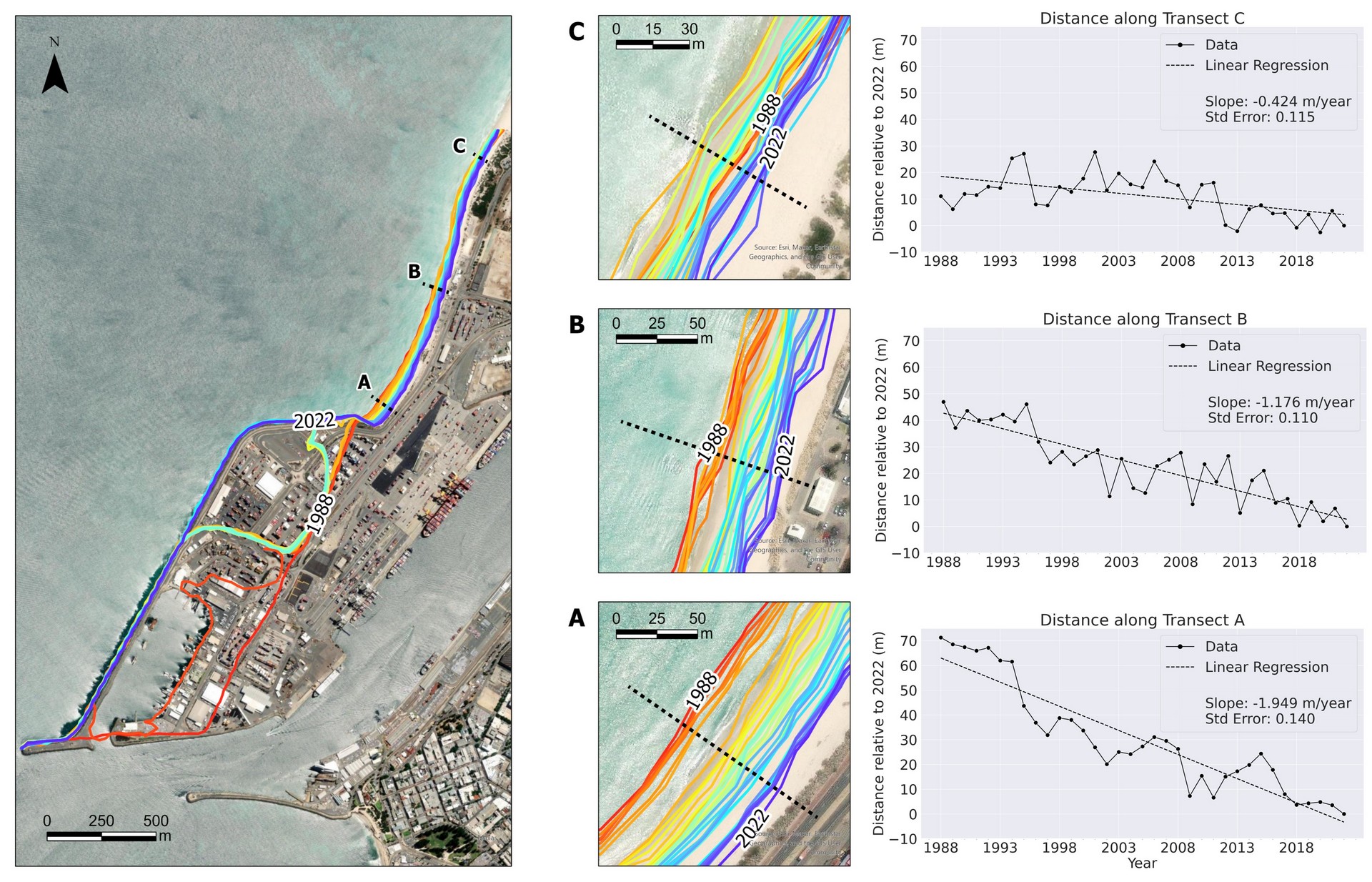
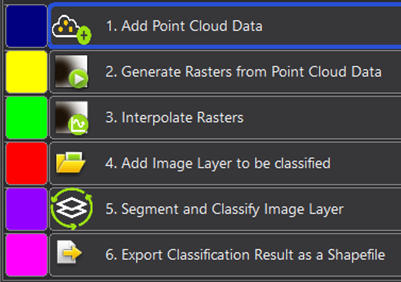
Internship Spatial Services GmbH
Course: Summer Internship
March 17, 2013 - July 31, 2013
Internship Report - The main acomplished tasks were: dwelling extraction using deep learning techniques, production of density maps in ArcGIS Pro, Flood Detection with GEE and development of Arcpy tools for data management.